Deep Imitation Learning for Humanoid Loco-manipulation
through Human Teleoperation
Mingyo Seo Steve Han Kyutae Sim Seung Hyeon Bang Carlos Gonzalez Luis Sentis Yuke Zhu
The University of Texas at Austin
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2023
Best Paper Award Finalist, IEEE-RAS TC Whole-Body Control
Paper | Code
|
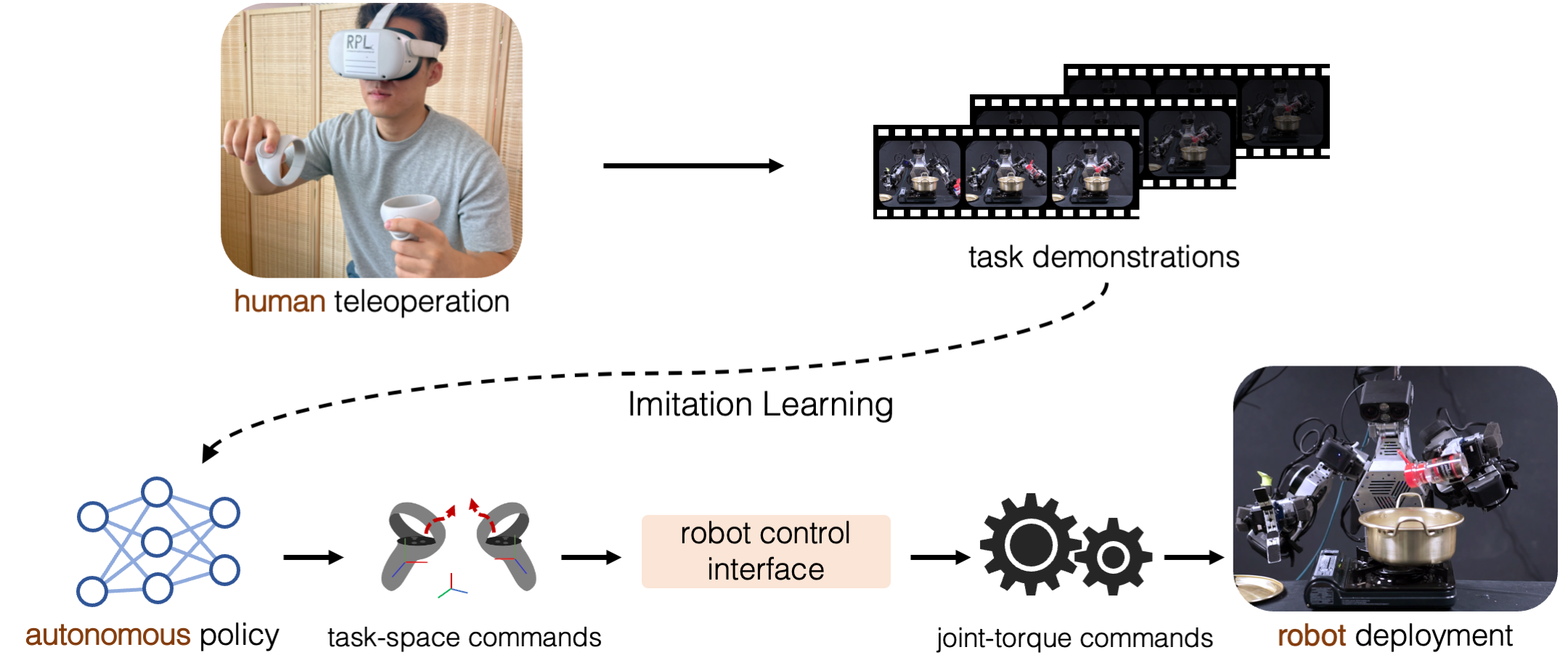
We tackle the problem of developing humanoid loco-manipulation skills with deep imitation learning. The challenge of collecting human demonstrations for humanoids, in conjunction with the difficulty of policy training under a high degree of freedom, presents substantial challenges. We introduce TRILL, a data-efficient framework for learning humanoid loco-manipulation policies from human demonstrations. In this framework, we collect human demonstration data through an intuitive Virtual Reality (VR) interface. We employ the whole-body control formulation to transform task-space commands from human operators into the robot's joint-torque actuation while stabilizing its dynamics. By employing high-level action abstractions tailored for humanoid robots, our method can efficiently learn complex loco-manipulation skills. We demonstrate the effectiveness of TRILL in simulation and on a real-world robot for performing various types of tasks. |
Method Overview
|
|
TRILL addresses the challenge of learning humanoid loco-manipulation. We introduce a learning framework that facilitates teleoperated demonstrations with task-space commands provided by a human demonstrator. The trained policies leverage human complexity and adaptability in decision-making to generate these commands. The robot control interface then executes these target commands through joint-torque actuation, complying with robot dynamics. This synergistic combination of imitation learning and whole-body control enables successful method implementation in both simulated and real-world environments. |
Hierarchical Loco-manipulation Pipeline
|
|
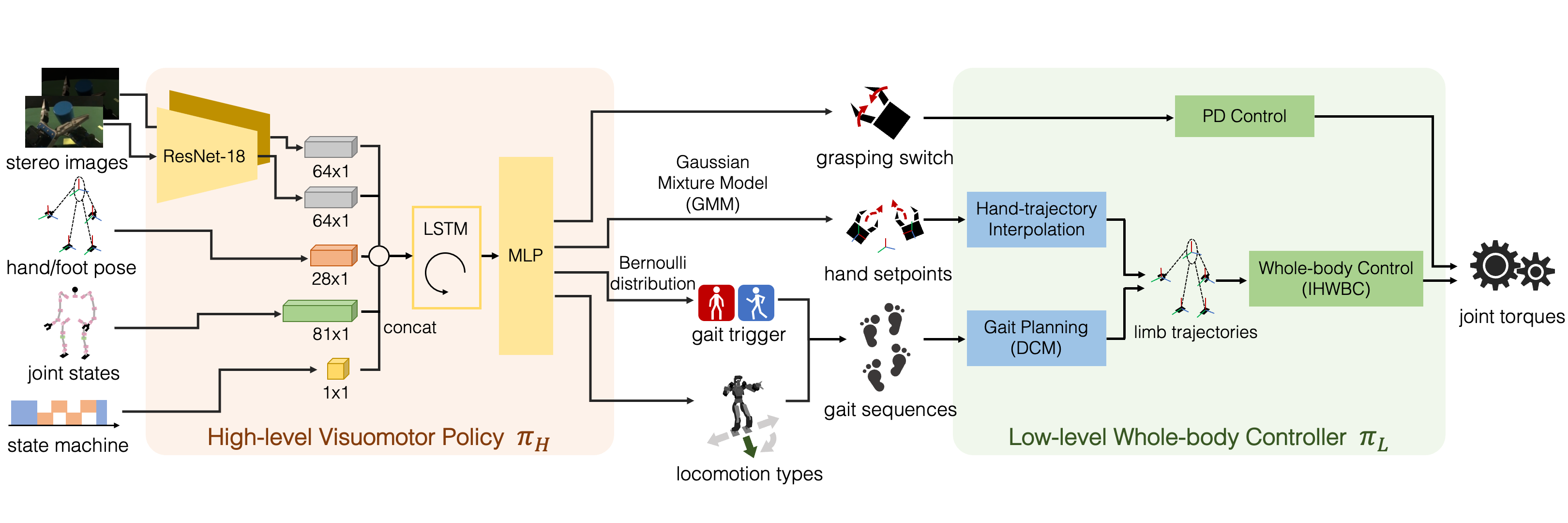
The trained policies generate the target task-space command at 20Hz from the onboard stereo camera observation and the robot's proprioceptive feedback. The robot control interface realizes the task-space commands and computes the desired joint torques at 100Hz and sends them to the humanoid robot for actuation. More implementation details can be found in this page. |
Real-Robot Teleoperation
|
We design an intuitive VR teleoperation system, which reduces the cognitive and physical burdens for human operators to provide task demonstration. As a result, our teleoperation approach can produce high-quality demonstration data while maintaining safe robot operation. |
|
Music: Happy by Luke Bergs |
Real-Robot Deployment
|
We demonstrate the application of TRILL on the real robot, deploying visuomotor policies trained for dexterous manipulation tasks. During evaluation, the robot performed each task 10 times in a row without rebooting and succeeded in 8 out of 10 trials in the Tool pick-and-place task and 9 out of 10 trials in the Removing the spray cap task, respectively. |
Simulation Evaluation
|
We design two realistic simulation environments and evaluate the robot’s ability to successfully perform subtasks involving free-space locomotion, manipulation, and loco-manipulation. TRILL, a framework tailored to train humanoid robots, achieves success rates of 96% for free-space locomotion tasks, 80% for manipulation tasks, and 92% for loco-manipulation tasks. |
Citation
|